电源
91篇文章
大家好!我是张飞实战电子的郭嘉老师,这篇文章聊一聊新能源汽车旋转变压器驱动电路讲解最终篇。
旋变器驱动电路总结
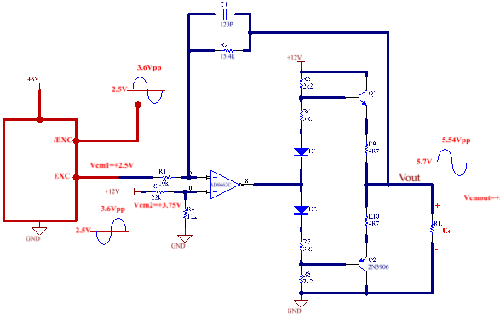
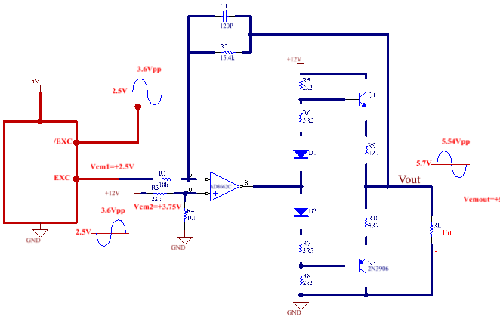
图(1) 旋变解码芯片AD2S1210的典型电路
由于旋变器的输入信号要求,激励缓冲器必须提供高达 200mA 的单端电流。图 1 所示的缓冲电路不仅提供电流驱动能力,而且提供 AD2S1210 激励输出信号的增益。本电路说明性能要求及推荐的激励缓冲拓扑结构,典型旋变器的输入电阻在100 Ω 至 200 Ω 之间,初级线圈应利用 7 V rms 的电压驱动。该旋变解码芯片支持 3.15 V p-p ±27%范围的输入信号。AD2S1210的额定频率范围为 2 kHz 至 20 kHz。采用 Type II 跟踪环路跟踪输入信号,并将正弦和余弦输入端的信息转换为输入角度和速度所对应的数字量。该器件的额定最大跟踪速率为 3,125rps。
AD2S1210 采用 5 V 电源供电,输出缓冲电路要求 12 V 电源(图1所示),以便向旋变器提供所需的差分信号幅度。
图 1 所示为 AD2S1210、AD8662 和相关电路的原理图,其中包括一个推挽输出级,它能够向旋变器提供所需的电源。本电路的优势之一是当不存在信号时,输出晶体管只需要少量静态电流。AD2S1210 的激励输出通常在EXC和/EXC输出端提供 3.6 Vp-p正弦信号,这将产生一个 7.2 V p-p差分信号。汽车旋变器的典型转换比为 0.286。因此,如果将一个单位增益缓冲器配合 AD2S1210 使用,则旋变器输出的幅度约为差分2 V p-p。这种信号的幅度不足以满足 AD2S1210 的输入幅度要求。理想情况下,正弦和余弦输入应具有差分 3.15 V p-p 的幅度,因此缓冲器级应提供约 1.5 的增益。
图 1 所示激励缓冲器的增益通过电阻 R1 和 R2 设置。在电路测试期间,R1 和 R2 电阻的值分别为 10 kΩ 和 15.4 kΩ,对应的增益为 1.54。电阻 R3 和 R4 设置放大器的共模电压 VCM(2) = +3.75 V。激励输出的共模电压 VCM(1) = +2.5 V(中间电源电压),差分电压VPP(1)=3.6V。因此,缓冲器输出共模电压 VCM(OUT)约为+5.7 V(+12 V 电源的大约一半),VPP(out)=5.54V。
2.2 kΩ 电阻为推挽电路输入端的二极管 D1、D2 提供偏置电流,并确立该侧的静态电流。D1 和 Q1 上的电压(VBE)应保持一致,D2 和 Q2 上的电压(VBE)应保持一致。3.3 Ω 电阻和 4.7 Ω 电阻上的电压也应保持一致。选择运算放大器 AD8662 是为了满足推挽输出级的驱动要求。旋变器和 RDC 转换器往往用于工况比较差环境中,因此一般需要能够在扩展温度范围(−40°C 至+125°C)工作的器件。该运放应提供 2 MHz 以上的带宽,输入失调电压应小于 1 mV。注意不得在 0 V 附近让信号引入失真,因为该失真可能无法被旋变器本身滤除。确保无失真的方法是设置输出晶体管的偏置,使得过零时仍然有足够的电流来维持线性。
由于所选的拓扑结构可以采用单电源供电,因此针对缓冲器选择的运放也应当能够采用单供电轨供电。AD8662 采用+5 V 至+16 V 的单电源供电,提供轨到轨输出,因而是理想的选择。电容C1 与电阻R2 并联形成一个低通滤波器,用来滤除EXC和/EXC输出上可能存在的任何噪声。应谨慎选择此滤波器的截止频率,确保滤波器所引起的载波相移不超过AD2S1210 的锁相范围。注意,电容C1 不是必需的,因为旋变器可以滤除AD2S1210 激励输出中的高频成分。应当注意,在电路验证过程中,旋变器的输出直接连接到AD2S1210 输入。客户应用中经常会使用其它调整电阻和/或无源 RC 滤波器。在 AD2S1210 之前可以使用其它无源器件,但应注意不要超过数据手册规定的 AD2S1210 最大锁相范围。外
部无源器件可能会导致通道间幅度不匹配误差,这会直接转化为位置误差。因此,信号路径中推荐使用至少 1%容差的电阻和 5%容差的电容。
图 4.1 所示为 70°角时采集到的 12 位角度精度码:
12 位角度精度码直方图,70°角,10,000 次采样
图 4. 2 位角度精度码直方图,70°角,10,000 次采样
所示为 16 位角度精度码直方图。
16 位角度精度码直方图,70°角,10,000 次采样
图 4.3 所示为 100 rps 旋转速率和 16 位分辨率设置时的速度输出码直方图。
16 位速度输出码直方图,100 rps,10,000 次采样
用于AD2S1210旋变数字参考信号输出的高电流驱动器
旋变数字转换器(RDC)广泛应用于汽车和工业应用中,用来提供电机轴位置和速度的反馈信息。
AD2S1210是一款完整的10位至16位分辨率RDC,片内集成了可编程正旋波振荡器,为旋变器提供激励信号。由于工作环境恶劣,AD2S1210的额定温度范围为-40℃至125℃的扩展工业温度范围。下图1所示的高电流驱动器放大AD2S1210的参考振荡器输出并进行电平转换,从而优化了与旋变器的接口。该驱动器是一个使用双通道、低噪声、精密运算放大器AD8662和分立互补发射极跟随器输出级的复合放大器。一个类似的驱动器级用于互补激励输出,从而提供一个全差分信号来驱动旋变器初级绕组。AD8662提供8引脚窄体SOIC和8引脚MSOP两种封装,额定温度范围均为-40℃至125℃的扩展工业温度范围.
用于AD2S1210 RDC参考信号输出的高电流缓冲器(图1)
一、互补功率放大电路:
目前使用最广泛的是无输出变压器的功率放大电路(OTL电路)和无输出电容的功率放大器电路(OCL电路),本节介绍OCL电路为例,介绍功率放大电路最大输出功率和转换效率的分析计算,以及功放中晶体管的选择。
1、OCL电路的组成及工作原理
为了消除基本OCL电路所产生交越失真,应当设置合适的静态工作点,使两只放大晶体三极管均工作在临界导通或微导通状态。能够消除交越失真的OCL电路如图2所示。
在上图中,静态时,从+12V经过R5、R6、D1、D2、R7、R8到GND有一个直流电流,它在Q1和Q2管两个基极之间所产生的电压为Ub1b2=UR6+UD1+UD2+UR7,使Ub1b2略大于Q1管发射结和Q2管发射结开启电压之和,从而使两只管子均处于微导通态,即都有一个微小的基极电流,分别为Ib1和Ib2。调节R6和R7,可使发射极静态电位Uout为0V,即输出电压Uo为0V.
当所加信号按正旋规律变化时,由于二极管D1、D2的动态电阻很小,而且R6和R7的阻值也比较小,因而可以认为Q1管基极电位的变化与Q2管基极电位的近似相等,即Ub1≈Ub2≈Ui。也就是说,可以认为两管基极之间电位差基本是一个恒定值,两个基极的电位随Ui产生相同变化。这样,当Ui>0V且逐渐增大时Ube1逐渐变大,Q1的基极电流Ib1随之增大,发射极电流Ie1也必然增大,负载电阻RL上得到正方向的电流;与此同时,Ui的增大使Ueb2减小,当减小到一定数值时,Q2管截至。同样道理,当Ui<0v且逐渐减小时,Ueb2逐渐增大,Q2的基极电流Ib2随之增大,发射极电流Ie2必然也会增大,负载电阻RL上得到负方向的电流;与此同时,Ui的减小,使Ube1减小,当减小到一定数值时,Q1管截至。这样,即使Ui很小,总能保证至少有一个晶体三极管导通,因此消除了交越失真。
大家好,我是张飞实战电子的郭嘉老师,今天要和大家讲一下纯硬件实现可调占空比的PWM发生器
我们要设计出可以调整的占空比,不影响频率,也就是说频率和占空比互不影响,而且像芯片一样还可以实现限制最大占空比
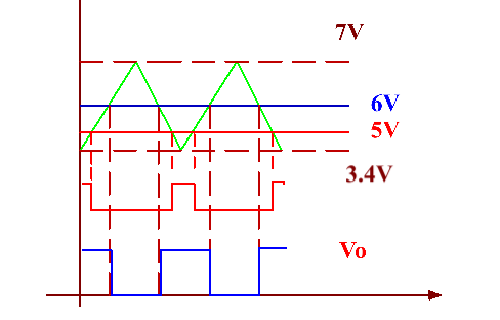
再加一级比较器我们看一下,怎么实现占空比调节。比较器的6脚与电容C20相连接,波形与C20上的波形一致,是三角波。 比较器5脚与滑动变阻器和电阻分压相连,通过调整滑动变阻器可以调5脚的电位。
假设我调整滑动变阻器把5脚电位调到6v,此时与6脚的三角波相比较,得出比较器的波形,及占空比。得到输出波形如蓝色所示,6v和VO.
假设我调整滑动变阻器把5脚电位调到5v,此时与6脚的三角波相比较,得出比较器的波形,及占空比。得到输出波形如红色所示,5v和VO.
通过滑动变阻器可以调整占空比。也就是5脚电平越低占空比越小。
刚上电的瞬间,会出现5脚一直电位大于6脚电位,比较器输出100%占空比。如果此时负载节NMOS,此时mos就直通了,功耗会非常大,很容易坏掉。 就像开车一样,一脚油门瞬间冲出去了,对人或对车都有很大的冲击,或者会造成一定的伤害。
所以5脚这里我们要改善一下,刚上电瞬间让5脚电位上升的慢点,等等6脚的电位,因为6脚与C20相连了,所及会上升的慢点,电容两端的电压是不能突变的。
所以5脚这里我们加个积分电容。让5脚上升的慢点。至少让6脚电位升到3.4v及以上
这样可以实现软启动,即5脚电压慢慢往上升省,比较器输出占空比慢慢加大。
如图6脚电位升到3.4v以上了,此时5脚电位上升到如3.4v、3.5v、5v和6v,比较器输出PWM占空比慢慢变大。
上面是上电的瞬间。
我们再看一下掉电的瞬间,可能会出现比较器的5脚大于6脚的情况,此时比较器输出PWM占空比就是100%了。我们怎么改善?
如突然掉电时,比较器5脚C14掉电快点,怎么实现呢?
我们加个P管Q5实现给C14自放电,当突然掉电时,即使三极管Ib很小,但是Ic可以达到βIb,β一般100,具体要看手册。这样就实现了掉电时,C14快速放电。防止比较器输出100%占空比。
这个可以调PWM占空比的 PWM发生器我们就完成了。即使没有单片机的,我们用纯硬件的也可以设计PWM发生器。
大家好!我是张飞实战电子的郭嘉老师,这篇文章聊一聊2个N三极管实现宽电压输入恒流电路讲解。
恒流源顾名思义,一定功率下,电流几乎不变电压可以变的电流源。一般常用在电机温度采样,即用PTC当作恒流源的负载,由于电流不变,PTC的内阻会随着温度的变化而变化,从而变化压降得到对应温度的变化。还有用在LED等驱动电路,可以同时控制数个或以上个LED灯,而且它的亮度基本一样。恒流源用途很多,就不一一举例了。
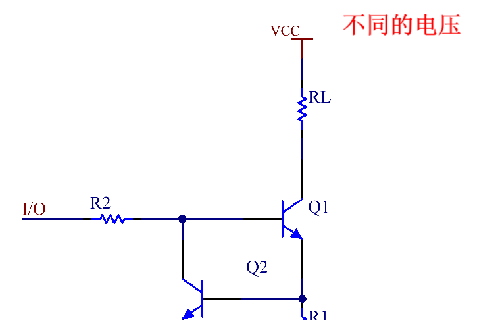
上图,用两个三极管搭建的恒流源电路,RL是负载,接LED或PTC都可以。
当Q1的b极电位大于等于0.7V的电压,Q1会导通。这里就加大Q1的b极电压, 当Q1导通后,形成Ic、Ie、Ib电流会流过R1,当R1两端的压降大于0.7V时,三极管Q2就会导通,R1两端压降会被Q2的be钳位在0.7V(Q1的b极电位大于等于1.4V的电压),此时Q1的b极到地的电压为:VR1+VBE(Q1),所以可以计算I/O口输出的电压:令Q1的基极Vb,得发射极Ve为Vb-0.7V,三极管的β=100,整理上面数据可得:(Vio-Vb)/R2*β=(Vb-0.7V)/R1+(Vio-Vb)/R2,Ie=Ibβ+Ib,Ib和Ie、Ic不是一个量级100倍以上的关系,所以Ib可以忽略,(Vio-Vb)/R2可以忽略,公式整理得(Vio-Vb)/R2*β=(Vb-0.7V)/R1,公式整理得:Vio=Vb+(Vb-0.7)*R2/(R1*β)。
只要Q1的基极Vb大于1.4V的电压,R1两端的压降始终会维持在0.7V,Q1的Ie电流恒为0.7V/R1,Ic即负载RL的电流约等于0.7V/R1。
现在分析通过Q1和Q2怎么实现1mA恒流的,无论VCC和Vin怎么变化都可以实现恒流,实现宽电压输入:上图所示这个电路中,单片机的的I/O口输出Vin:Vio=Vb+(Vb-0.7)*R2/(R1*β)=Vb+(Vb-0.7)*3.5k/0.7K*100
=Vb+0.05Vb-0.035
=1.05Vb-0.035=Vin,令Vin=1.4V,可得Vb=1.36V,
当令Vb=1.4V时,Vin=1.05*1.4-0.035=1.435V,以上三极管的Vbe压降按照0.7V算,VCES按照0.3V算。
只要Vin大于等于1.435V,VCC大于等于VRL+VCES1+VR1。如果把RL用PTC100代替,设计恒流源为1mA,根据VCC大于等于VRL+VCES1+VR1=100Ω*1mA+0.3V(Q1的饱和压降)+700Ω*1mA=1.1V。
综上所述,恒流必须要满足VCC大于等于1.1V,Vin大于等于1.435V,这个恒流源恒成立。Q1的Ie=Ic+Ib,通过公式可以看出Ie的电流由Ic和Ib共同决定,即Ic提供不了1mA电流Ib会补,正常Ic电流远远大于Ib,所以Q1实现了恒流。当负载Ic突然变大时,Ve的电位会升高,Q1的Vbe压降会变小,Ib也会变小,Ic也会变小。当负载Ic变小时,Ve会变小,Vbe会变大,Ib会变大,Ic变大。这样就实现了闭环调节。当Vin不断变大时,R1的压降大于等于0.7V时Q2会导通,Ve会被Q2的BE压降钳位在0.7V,此时仍能保持Q1的Ie稳定1mA输出。
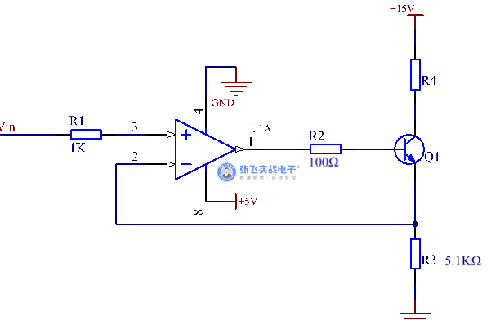
大家好!我是张飞实战电子郭嘉老师,今天给大家分享运放实现恒流源电路。
上图是运放搭建的恒流电路,和上期讲的一样,实现1mA的恒流源。他的工作原理主要通过运放的电压跟随电路和三极管的射级跟随电路。
假设这里使用的U1A运放放大倍数是10万倍,三极管的放大倍数是β=100。刚开始上电时,假设Vin输入为2.5V,运放不带负反馈,运放输出2脚电平从0V开始往上升一直升到运放的饱和电压,即运放的供电电压+5V。如果加入负反馈,Vin=2.5V,假设运放的输出1脚此刻升到了1V,由于负载R4需要1mA的恒流源,Q1的Ic=1mA,β=100,可得Ib约等于1mA/100=0.01mA=10uA,从上面的数据可得,此时流过R2的电流是uA级别的,非常小,所以R2两端压降近似等于0V,1V的电压全部加到Q1的B极,Vb=1V,Q1的发射极E极Ve=0.3V,可得Q1的Ie电流为Ve/R3=0.3V/5.1k=58.8uA,同时Ve=0.3V,反馈到运放的2脚,由于接在运放反相端作反馈的,所以也叫负反馈。上图所示2脚得到一个电位与Ve电位相等Ve=0.3V,Vin还是2.5V,Vin-Ve=2.5-0.3=2.2V,运放放大倍数是10万倍如果没有负反馈输出直接会饱和了,这里的反馈可以使运放输出不会达到饱和,它会达到Vin的值2.5V,由于运放放大倍数是10万倍,运放的IN+和IN-的电压差可以忽略不计,也就得到VIN+=VIN-,也就是我们常说的运放“虚短”。
如果Vin此时输入的是2.5V,VIN+输入为什么也是2.5V呢?答案很明显,运放输入阻抗接近无穷答,输入电流只有pA级,大的也就uA级,R1两端的压降约等于0V,所以Vin=VIN+,也就是运放的“虚断”。
根据虚断原理,Vin=VIN+;根据虚断原理,VIN+=VIN-=Vin=2.5V,当运放动态平衡后VIN-会稳定在2.5V,同理Ve=2.5V,根据Q1N三极管的射极跟随,Vb=Ve+0.7V=2.5+0.7V=3.2V,即运放的Vout=3.3V。从上面的数据可得,Ve=2.5V,R3=5.1K,I=2.5V/5.1K=0.49mA=490uA.我设计的目标值这里要达到1mA,根据Vin=VIN+=VIN-=5.1V,得Ve=5.1V,R3=5.1K,Q1的Ie=Ve/R3=5.1/5.1K=1mA,就达到我的设计要求了,这样负载R4就可以实现1mA的恒流了。
 郭嘉
郭嘉