电源
91篇文章
大家好!我是张飞实战电子蔡琰老师!今天给大家分享红外遥控接收。
平时我们经常会用到遥控器,那么现在遥控器也分很多种类,有使用红外通信的,也有使用蓝牙,无线的等,今天我们来一起解码一下红外的工作原理。
大家看现在图中的是2个红外对管,左边是发射端,右边是接收端,
遥控器上有一个红外发射二极管,发射红外数据信息,电视机上有一个红外接收管,接收红外信息,那么到底是怎么把数据从二极管中发送出去的呢?
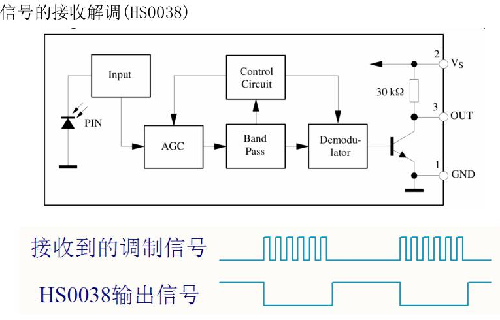
如上图,遥控器发送之前要先进行编码调制,然后进行信号放大发射,接收设备需要先对这个信号进行解调,解调之后的信号送给单片机,单片机进行解码(分析是什么数据)。
调制过程就是需要加上载波信号,中间加载了一个载波信号,发送的数据就是通过载波信号送出去的,对应的接收信号就需要对收到的载波信号进行解调处理了,即信号还原。
一般情况下接收头,只能解调固定的一种载波频率信号,那遥控器的发送信号的载波频率要与接收头所用的频率一致,否则是没办法正确接收的。自然界中存在红外光,进行调制主要是为了避免一些干扰,以防止传输出错。下面我们一起来看看遥控器传输的协议编码规则。
遥控器信号开始的地方有一段特殊长度的信号,这个我们叫它是引导码,引导码是9ms高电平+4.5ms的低电平,单片机只有结束到了正确的引导码,才可以开始接收后续的数据。
我们知道有效数据要么是0,要么是1,0或者1都是由一个固定的高电平+低电平组成,数据1: 0.56ms高电平+1.69ms低电平组成,数据0: 0.56ms高电平+0.56ms低电平组成,也就是说收到这样的一个高电平+低电平的数据就是认为收到有效数据了,再根据判断时间来区分是0还是1。通过分析出来0 1,再把这些0 1组合成一个有用的数据,然后进行处理执行动作,比如切换频道,关机、开机等。这样就是一个完成的遥控器发送,接收原理了。
上图是我们实测的一个遥控器解调后的波形中,你能分析出图中传输的数据吗?

volatile修饰的变量是说这变量可能会被意想不到地改变。通常对于程序员而言,单片机中用的就算常见了。
volatile 是易变的,不稳定的意思。其实对于很多人来说,根本没见过这个关键字,不知道它的存在。也有很多人知道它的存在,根本没用过,我对它有种“杨家有女初长成,养在深闺无人识”的感觉。
那么volatile关键字到底是什么意思呢,怎么用呢。
1、volatile其实和const一样是一种类型修饰符,用它修饰的变量表示可以被某些编译器未知的因素而改变,比如操作系统、硬件或者其他线程等等。遇到这个关键字声明的变量,编译器对访问该变量的代码就不再进行优化,从而可以提供对特殊地址的稳定访问。
①、我们举个例子,
int i=10;
int j=i; //①语句
int k=i; //②语句
此时编译器对代码进行优化,这是因为在①、②两条语句中,i没有被用作左值(没有被赋值),这时候编译器认为是i的值没有发生改变,所以在①语句时从内存中取出i的值赋给j之后,这个值并没有被丢掉,而是在②语句时继续用这个值给k赋值。编译器不会生成出汇编代码重新从内存里取i的值(不会编译生成装在内存的汇编指令,比如ARM的LDM指令),这样提高了效率。但要注意①和②语句之间确认i没有被用作左值才行。
②、再看一个例子:
volatile int i=10;
int j=i; //③语句
int k = i; //④语句
volatile关键字告诉编译器,i是随时可能发生改变的。每次使用它的时候必须从内存中取出i的值,因而编译器生成的汇编代码会重新从i的地址处读取数据放在k中。
这样看来,如果i是一个寄存器变量,表示一个端口数据或者是多个线程的共享数据,那么就容易出错,所以说,volatile可以保证对特殊地址的稳定访问。
2、我们知道做电子方面技术工作的一般面试的时候都有笔试,比如单片机软件方面,考题基本都会有对这个关键字的考察,可想在单片机中这个关键字的重要性,一般题目会有对这个关键字的定义是什么,就是你得知道它的概念,然后就是举例说明这个关键字使用的例子,这个时候就能考察出大家对这个关键字的具体理解了。
一般我们知道的是:
1、 并行设备的硬件寄存器(比如状态寄存器)
2、 一个中断服务子程序中会访问到的非自动变量
3、 多线程应用中被几个任务共享的变量
当我们回答出这些时基本可以知道你对这个关键字是懂的,如果做嵌入式的话,程序员经常和硬件、中断、RTOS等等打交道,所以这个关键字必须要懂。
3、那么我们再延伸一下,一个参数既可以是const也可以是volatile,那么举个例子就是只读的状态寄存器,那么只读就是const,并且要确定程序不能试图去修改它,再有就是volatile代表状态寄存器,可能被意想不到的改变。
4、那么指针是不是可以用到这个volatile关键字吗,是可以的。
这个我们只要了解即可,用的不多。但是得知道。举个例子就是当一个中断服务子程序修改一个指向一个buffer的指针的时候。修饰也和const类似,const有常量指针和指针常量的说法,volatile也可以这样认为,
比如修饰由指针指向的对象或数据是const或volatile的。
例如:
volatile char *p1;
比如指针自身的值---一个代表地址的整数变量是const或volatile的。
例如:
char* volatile p1;
对于这个关键字不仅C语言有,其他语言比如C++,JAVA其实都有。其他语言大部分是因为多线程共享变量的使用不被编译器优化的错误产生,比如优化编译器把一个变量从内存装入CPU寄存器中,那么两个线程有可能一个使用内存中的变量,一个使用寄存器中的变量,这回造成程序的错误执行。那么用了volatile来修饰变量了呢就是要告诉编译器每次操作这个变量的时候一定要从内存中真正取出,而不是使用已经存在寄存器的值。
对于volatile怎么修饰变量,什么变量需要这个关键字修饰,大家心里有数了吧?
①邂逅
女汉子是从小挂在我身上的标签,身体好,性格直。然而报志愿也是听亲戚推荐然后选择了计算机,话说计算机是没有嵌入式以及单片机的,只会学些计算机的语言(偏上位机),大学的所有懒惰的美好(通宵打游戏,谈恋爱等等)都体验了一番才发现是要毕业了,突然意识到自己能去干点啥,就在这个时候学校有合作的嵌入式培训,起初也是想着就业去的,而且当时看到师兄做了个机器人,又会唱歌又会跳舞,太好玩了,这个真的是激起了我的兴趣。就这样开启了学习嵌入式以及单片机的路程~
②笨手笨脚的第一次
单片机,ARM一系列课程,当时感觉真的可以收获颇丰,也不会很难的吧。兴趣满满的去上课,认识元器件,画原理图,看程序。简直眼花缭乱啊,自信被打去了一大半,开始怀疑人生了,不知道自己是否能学会,就这样结束了学习的第一课。
③越挫越勇,继续奋斗
当一个人想认真做一件事的时候,你会发现潜力无限啊,韧劲也是无限的呢。认真起来的样子也是很可爱的,每天充实的生活,学习,什么都不想了。当你坚持下来之后,回头看看那些坚持是收获了太多。单片机就这样在曲折的道路上学完了,有时候学了会自信满满,有时候会在崩溃的边缘,然鹅这都被我强大的内心压下去了。
想来学完单片机真的自己会设计东西吗,记得第一次做交通灯的时候那个兴奋劲,从原理图设计,到PCB,再到程序设计,虽然做出来了,其实现在想想当时并没有完全理解了。
从此开始对各种电子小产品有了兴趣,拆拆装装,虽然不是每次都能完全对上,但总归让自己觉得一只脚踏入了智能社会了。哇,那个心情啊~
其实每个知识点的学习都是垫脚石,除了坚持不懈,还要不断的学习,不断的实践,买来开发板自己研究,去网上搜集各种资料,从多次失败中总结经验,每次踩过的坑都是经验的积累过程,学习的过程不就是把知识变成自己的嘛,能灵活运用了才是真的学到了。
④心得
作为一个女汉子我想对那些想接触单片机以及嵌入式的萌新说,我一开始也是被嵌入式做的产品吸引才学的,也做了无数次的实验,经历过无数次的失败,也担心不是科班出身还想做电子产品,被质疑的眼神以及话语再退缩了。
开始找工作确实很没有底气,总是觉得自己不行,不敢投简历,不敢去面试,一段时间的低迷让我整个人有点没了方向。谁让我还算强大呢,即使是兴趣是最好的老师,那也离不开对爱好的不离不弃啊~汗水下面永远都是会夹杂点泪水的呢,笑到最后的永远都是靠坚持的。
我只是想告诉大家如果对嵌入式感兴趣就一定去试试,不管结果怎么样,爱好就去接触下,没准就能爱了呢,会有很大收获的。
大家一定要有个记录的好习惯,好记性不如烂笔头,记录不仅可以鼓励自己,还能留下你的拼搏奋斗的脚印。回头发现原来自己还能如此优秀。
行走江湖,技艺可多但是需精湛,每个项目的磨炼,每个日夜的奋斗都会给你留下美好的回忆。同为爱好者,我们有机会可以一起畅谈人生,畅谈理想~
话说做这个转换的全隔离小模块也是因为自己做单片机软件设计那么多年,各种通信端口软件都做过,然而需要调试都会用到这些辅助模块来跟上位机通信,这个是最简洁的通信验证方式,那么这些小模块还是很容易坏的,好多时候都会赶在项目节点上突然故障,被迫停下赶紧采购,影响进度不说,还很影响调试产品的心情啊,所以才想去研究设计一个,自己做过的不是用起来也会顺手一些呢。
首先开始分析实现流程,然后选取集成芯片等工作。
开始了,那一起看下标题,我想要实现的是转换通信模块,那么需要一个转换芯片;还有就是全隔离,自然需要一个隔离芯片。这是大体方向,细节再慢慢实现下吧。
1、既然是USB转,那么我直接用USB供电就好了,就不需要再外部供电了
输入5V电,后端TTL也是5V;输入端加个保险丝,以及后面加的隔离芯片,都是为了保护电脑USB接口。输入端一般我会加一个LED灯,指示用的。
2、输入后的信号就开始进行转换了,我选用了CH340G转换芯片,附件可以自行查看下数据手册啊,如果对你其他项目有帮助可以查看下呢。
信号线一般需要加个小电阻(10R够了)做防震荡作用,这个芯片工作起来需要一个晶振,晶振的起震电容设计就不用多说了吧,电源端部分还要有储能和滤波电容,这个也不用多说了吧,那么一起来看下转换端部分的设计原图:
3、信号转换后就是进行全隔离了,前面加保险丝的时候说明了隔离的作用,就是保护,有些时候我们也知道如果没隔离,对于我们的USB接口还是有不确定性的,接入的模块你不确定会不会有干扰,什么干扰,我觉得还是很有必要对这些频繁用到的模块加隔离比较稳妥,个人见解。
对于隔离,除了信号还有电源和地的隔离,这才叫全隔离,那上图看下吧。
另外输出部分有电源、地、信号发送接收了,输出是5V输出能力100mA,如果目标板电流过大,建议使用外部独立电源供电,使用外部独立供电时可不接5V,但必须要接GND,这个是要注意的。
主要部分的设计就完成了,是不是觉得其他我们平时买的小模块内容也没想象中那么复杂,其实做任何设计都要选定芯片研读芯片手册,不管做软件设计也好,硬件设计也好,只是关注点不一样。当然还有一些是经验值。
当我们熟悉了这些模块的设计,即便买来的碰到故障了不是很容易分析处理一下的,最起码不会影响工作进度的。多学点总归没错的。
后面就开始设计PCB过程了,最后产品出来就可以通信使用了,每个过程都会有收获的,如果大家感兴趣的话就持续关注我吧。后面会陆续分享出我的设计视频过程,随时欢迎大家跟我来探讨,也让我可以开阔下思路,或许还有其他实现方式,不同的尝试过程才是经验积累成长的过程。
ModBus是什么?干什么用的?我们一起来了解下吧。
作为一些大型工业商,其实需要不同厂商提供的控制设备来组成一个工业网路,有了网络是不是需要监控啊?就像你的汽车一样,其实有一个总的控制系统在监控着油箱,行驶安全等等很多信息,所以才呈现给我们一个安全的驾驶体验。那么开发总的控制系统如果那么多的设备都各自有一套通信方案,开发难度可想而知了吧?这个时候就需要有一个标准了,那么这个modbus就是自动控制业界的标准,其实可以理解为我们交互的一个标准协议。这样对开发进度提升了,对通信安全提升了,还方便多个链路之间的通信,集中监控也更加方便了。
既然是通信的标准,也就是规范了通信的应用层。根据这个标准我们各自去进行工作就好了。这个标准的网络架构我们一起来看下:
这个协议定义了一个控制器能认识的使用的消息结构,而不管是经过何种网络进行通信的。
我们看到网络中每种设备(PLC、HMI、控制面板、驱动程序、动作控制、输入/输出设备)都能使用modbus协议来启动远程操作。
通常我们在串行通信中用到modbus都是主从结构,总线上有一个主节点,一个或多个从节点。从节点地址是唯一的,通信模式是主节点发起请求,子节点没有收到来自主节点的请求时,从不会发送数据,子节点之间从不会互相通信。主节点在同一时刻只会发起一个modbus事物处理。
我们说到这种协议是主从协议模式,主节点可以广播给所有节点请求,这就是广播模式,这种模式就是从节点不需要应答,接收到处理就可以了,地址0是专门用于表示广播数据的。
还有一种是单播模式,就是主节点以特定地址访问子节点,子节点接到并处理完请求后,子节点向主节点返回一个应答。
那我们一起看下协议描述:
首先我们看两个概念,ADU:应用数据单元;PDU:协议数据单元。可以理解为PDU就是我们的应用层协议解析需要的。
其实简单来看就是这样的一个结构,地址域只针对于从节点而言,也有规定(0是广播地址,1~247是从节点地址,248-255预留)其实就是一个字节的分配了。
那么功能码就是指明要执行的动作。
功能码后面的数据域就很容易理解了,是表示含有请求和响应参数的数据域。数据域虽然给了长度范围,也可以是没有的,功能码就能代表操作了。
后面还有一个校验,就是做过通信的都知道校验是必须要的。否则怎么确保数据的正确性。
对于ADU的长度也是有限制的,最大ADU是256个字节,具体在什么物理层上通信对于PDU就有区别了,比如RS232/RS485 ADU = 地址域(1字节)+ PDU(253字节)+CRC(2字节)=256字节;还支持以太网口,也就是在TCP/IP协议层上封装了一层modbus协议,这样应用范围更广了。那么TCP MODBUS ADU = 249字节 + MBAP(7字节) =256字节。
到这里我们就可以知道了协议结构、协议模型、协议规则。简单来说就是主机是老大,它说了算,它想设置或者读取哪个从机,从机才能做出响应,所以说从机是被动的。当广播发送的时候无需应答,这就是定义的规则,有了规则做事就方便多了啊。
具体的还详细做了主机的处理模型,从机的处理模型,所有正常的和异常的处理都在规则里面了,是不是很贴心。基本上把逻辑关系都考虑到了,只要按照逻辑关系图去写程序就好了。那么对于解析而言,主要还是对于功能码和数据域的值了。也就是到了上层应用了。
对于串行传输还有两种模式,RTU模式和ASCII模式。
我们先来了解一下RTU模式:
对于报文格式就是上面这样的,子节点收到信息先解析是否是自己节点,然后对校验做出比对处理。然后就是上层的功能码和数据的处理了。除了数据解析还有一个超时处理,总不能一直接收吧,有个超时的要求,两个字节之间间隔大于1.5个字符时间,报文帧就被认为不完整应该被接收节点丢弃。两帧数据之间也有时间间隔要求,最小间隔是3.5个字符时间。
这个模式也是我们在工业控制中通用的模式,协议紧凑。
还有一个ASCII模式:
我们都知道ASCII码是一个字符一个字符发送的,也就是表示0-9,A-F;那么就是说一个字符表示四位二进制,也就是我们前面说的一个字节需要两个ASCII字符表示,所以这个相对RTU模式时序要求不高,自然应用场合也是有区别的。
跟RTU不同的是还增加了一个起始字符和结束字符,校验方式是LRC校验方式,校验不包含起始字符和结束字符的。对比而言,我们看到是一个字节由两个字符表示的。字符间隔最大可以达到1S,相对宽松。
结构清晰了,规则有了就是可以去解析了,主要还是对功能码和数据域的规则解析了,不同的功能码要处理什么功能的数据区,这个都是要根据规则去解析处理。
解析这种标准协议首先就是要分好层,逻辑关系要处理清楚,模块处理要结合实际应用映射关系,对于从节点有接收有应答,就是一个完整的闭环。你对modbus了解了吗?
 蔡琰
蔡琰