电源
91篇文章
大家好,我们张飞实战电子黄忠老师,今天我们讲解程序的链接和存储区的解读。
根据C语言的特点,每一个源程序生成的目标代码将包含源程序所需要表达的所有信息和功能。有些时候很有必要从这些段中来分析实际使用情况和改进空间。目标代码中各段生成情况如下:
1、代码段(Code)
代码段由程序中各个函数产生,函数的每一个语句将最终经过编译和汇编生成二进制机器代码(具体生成哪种体系结构的机器代码由编译器决定)
2、只读数据段(RO Data)
只读数据段由程序中所使用的数据产生,该部分数据的特点是在运行中不需要改变,因此编译器会将该数据放入只读的部分中。C语言的一些语法将生成只读数据段。
① 只读全局变量
例如:定义全局变量 const char a[100]={“ABCDEFG”};
这个是生成大小为100个字节的只读数据区,并使用字符串“ABCDEFG”初始化。如果定义的时候没有指定大小,那么根据初始化的字符串长度生成相应大小的只读数据段。
② 只读局部变量
例如:在函数内部定义的只读变量 const char b[100]={“9876543210”};
③ 程序中使用的常量
例如:在程序中使用printf(“information n”),其中“information n”是字符串常量, 编译器会自动把常量放入只读数据区。
注意:上面两个变量定义,定义100个大小的区域,但是只初始化前面几个字节,实际后面的字节没有初始化,但是在程序中也不能写,实际是没有任何用处的。所以定义只读的时候需要做完全的初始化。
3、读写数据段(RW Data)
读写数据段表示了在目标文件中一部分可以读也可以写的数据区,在某些场合它们又被称为已初始化数据段。这部分是属于程序中的静态区域。
①已初始化全局静态变量
在函数外部定义的全局的变量,并且初始化。(static是限制作用域的)
②已初始化局部静态变量
在函数中定义的由static定义并且已经初始化的数据或者数组。
注意:定义的变量要有初始化才会在读写数据区。
4、未初始化数据段(BSS)
这个段也属于静态数据区。但是没有初始化,所以在目标文件中会有标识,而不会真正称为目标文件中的一个段,这个段会在运行时产生,所以它的大小不会影响目标文件的大小。
比如上面这个图就是通常我们编译后获得的。当你的方案选型是一个空间很小的处理器的时候很有必要了解这些存储的区域都存的是什么,方便处理冗余或者修改方案。
上面我们了解了程序对应的存储空间,程序是怎么对号入座到这些存储区的呢?一起来看下吧,也没想象的那么神秘。
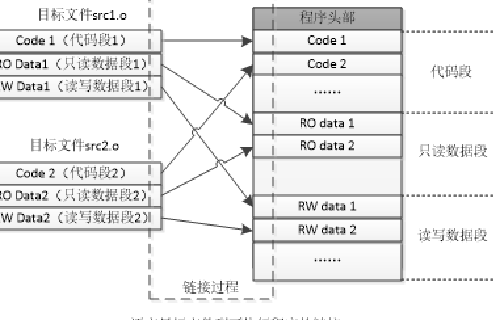
我们每一个C语言源程序(*.c)经过编译生成目标文件(.o),目标文件就包含前面我们说的代码段、只读数据段、读写数据段。未初始化数据段、堆和栈不会占用目标文件的空间。
那么可执行程序是由各个目标文件经过链接而成,链接就是把各个目标文件的代码段、只读数据段、读写数据段经过了重新的排列组合。
需要注意的是未初始化数据段是怎么样的,在链接的过程中,链接器可以得到未初始化数据段的大小,它也是各个目标文件的各个未初始化数据段之和,但是这个段是不影响可执行程序大小的。在C语言使用的角度,读写数据段和未初始化数据段都是可读写的。实质上,在目标文件中未初始化数据段和读写数据段的区别也在于此,读写数据段占用目标文件的容量,而未初始化数据段只是一个标识,不需要占用实际的空间。
在链接过程之前,各个源文件生成目标文件相互没有关系。在链接之后,各目标文件函数和变量可以相互调用和访问,从而被联系在一起。比如函数调用,链接过程就是要有函数调用的地方还需要找到真正的函数定义才可以完成链接,链接器会根据需要根据实际的情况修改编译器生成的机器代码,完成正确的跳转。全局变量的访问也是同理。
再来了解下链接过程中常见的错误:
1、符号未找到
(1) 只要符号被声明,编译就可以通过,但是在链接过程中符号必须具有具体的实现才可以成功链接。
(2) 由于数据仅能在文件内部使用(static),导致符号未定义错误。
2、符号重定义
(1) 在多个文件中定义全局的同名函数和变量(static的重名了是正确的)。
(2) 在头文件中定义已经初始化数据,在头文件被多个文件包含的时候,将发生错误。同样在头文件中也不应该定义只读数据段的常量。
再有在头文件中不应该使用静态的变量,无论它有没有初值,这样虽然不会引起链接错误,但是在各个源文件中各自产生变量,不但占用空间,而且在逻辑上是不对的,也违背了头文件的使用原则。
从C语言程序设计的角度,不应该在头文件中定义变量或者函数。对于函数,在头文件中只是声明,需要在源文件中定义;对于变量,无论何种性质,最好的方式是在C语言的源文件中定义,在头文件中使用extern声明使用。
编译,链接后面就是执行了,后面我会跟大家再分享程序运行过程,这个其实都是C语言定的一些规则,只要守规则就会顺利完成想要实现的结果。

在C语言代码(文本文件)形成可执行程序(二进制文件),需要经过编译-汇编-链接三个阶段。编译过程把C语言文本文件生成汇编程序,汇编过程把汇编程序形成二进制机器代码,链接过程则将各个源文件生成的二进制机器代码文件组合成一个文件。
C语言编写的程序经过编译-链接后,将形成一个统一文件,它由几个部分组成。在程序运行时又会产生其他几个部分,各个部分代表了不同的存储区域:
1、代码段(Code或Text)
代码段由程序中执行的机器代码组成。在C语言中,程序语句进行编译后,形成机器代码。在执行程序的过程中,CPU的程序计数器指向代码段的每一条机器代码,并由处理器依次运行。
2、只读数据段(RO data)
只读数据段是程序使用的一些不会被更改的数据,使用这些数据的方式类似查表式的操作,由于这些变量不需要更改,因此只需要放置在只读存储器中即可。
3、已初始化读写数据段(RW data)
已初始化数据是在程序中声明,并且具有初值的变量,这些变量需要占用存储器的空间,在程序执行时它们需要位于可读写的内存区域内,并具有初值,以供程序运行时读写。
4、未初始化数据段(BSS)
未初始化数据是在程序中声明,但是没有初始化的变量,这些变量在程序运行之前不需要占用存储器的空间。
5、堆(heap)
堆内存只在程序运行时出现,一般由程序员分配和释放。在具有操作系统的情况下,如果程序没有释放,操作系统可能在程序(例如一个进程)结束后回收内存。
6、栈(stack)
栈内存只在程序运行时出现,在函数内部使用的变量、函数的参数以及返回值将使用栈空间,栈空间由编译器自动分配和释放。
C语言目标文件的内存布局如下图:
代码段、只读数据段、读写数据段、未初始化数据段属于静态区域,而堆和栈属于动态区域。代码段、只读数据段和读写数据段将在连接之后产生,未初始化数据段将在程序初始化的时候开辟,而堆和栈将在程序的运行中分配和释放。
C语言程序分为映像和运行时两种状态。在编译-链接后形成的映像中,将只包含代码段(Text)、只读数据段(RO Data)和读写数据段(RW Data)。在程序运行之前,将动态生成未初始化数据段(BSS),在程序的运行时还将动态形成堆(Heap)区域和栈(Stack)区域。
一般来说,在静态的映像文件中,各个部分称之为节(Section),而在运行时的各个部分称之为段(Segment)。如果不详细区分,可以统称为段。
每一个源文件生成的目标代码有了这些段的区分,那么每个段就能表示出源文件想要表达的信息和功能。下一篇我们一起深入分析下在这些段中是怎么体现的源码的信息的。
大家好,我是张飞实战电子黄忠老师,今天我们学习ADC参考电压。
工程中大家经常会用到ADC来采集模拟电压,把模拟量变为数字量进行系统处理,有时候看到采集结果,什么?这个结果跟实际采集的信号怎么还有点小差距?那么就有可能是参考电压的问题。
参考电压有多重要,我们得要弄清楚它在ADC转换中扮演一个什么样的角色,弄清楚这个问题,我们需要从ADC的转换原理入手,一般单片机里面ADC模块使用的是逐次逼近型转换,也就是通过这种方法原理把模拟量转换为数字量,那什么是逐次逼近呢?
我们先来说一个生活中的案例,我们用天平称一个物体的重量,过程是这样的:从最重的砝码开始试放,与被称物体行进比较,若物体重于砝码,该砝码保留,否则移去。再加上第二个次重砝码,看物体的重量是否大于砝码的重量决定第二个砝码是留下还是移去。照此一直加砝码,到最小一个砝码为止。将所有留下的砝码重量相加,就得到物体的重量。
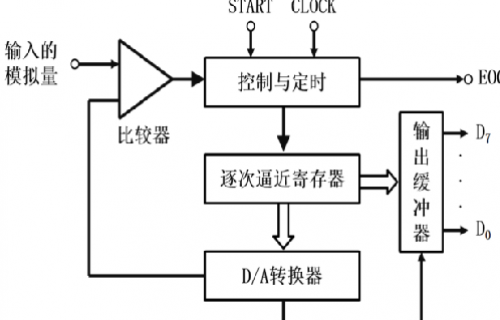
逐次逼近原理和上面的原理相同,下面我们看逐次逼近型ADC的原理,请看图:
上图是一个8位逐次逼近型ADC的框图,“输入的模拟量”是输入电压信号,“START”用来控制ADC启动转换,“CLOCK”是ADC模块的输入时钟,“EOC”是ADC转换结束信号,“OE”是ADC转换结果输出允许信号,“VREF”是参考电压。
随着时钟信号的输入,启动信号的开始,控制模块会逐次控制逐次比较寄存器产生不同的数据,数据产生后会送给D/A转换器,D/A转换器会依据参考电压,把这个数字量转化为模拟量送给比较器,比较器比较D/A转换器送出来的模拟量和输入模拟量的大小,产生的结果给控制单元电路,控制单元电路根据上一次的结果再次控制产生不同的数据,让D/A变成模拟量,再去比较,以此这样循环,每次比较,比较器会得出一个结果高或者低,根据这个结果决定当前产生的数字量是大了还是小了,一次一次的比较,找到那个和输入模拟量最接近的数字量,最后把这个数字量控制送到输出缓冲器,并且控制送出EOC输出转换完成信号,这就是一个大致的逐次逼近工作原理。
关于具体是怎么控制比较的,这个过程我们就不再展开,我有一个免费的视频是专门解析这个过程的,链接是(https://www.bilibili.com/video/BV1xV411s7J4/);从上面的描述中,我们抓住一个重点是:D/A转换器会依据参考电,把生成的数字量变为模拟量,在转换的时候必须需要有一个参考电压,这个电压就是我们AD模块的参考电压,那么大家试想,如果参考电压都不稳定的话,转出来的模拟量是不是也不会稳定,那么和输入模拟量比较的时候,比较的结果也就可能会发生偏差,造成错误的比较结果。
那怎么来保证这个参考电压比较稳定呢?1.我们可以在参考电压引脚附近就近放置电容(一大一小,大的储能,小的滤波);2.可以在参考电源前端串一个小电感再加电容。如图所示,这两种方法比较常见,也比较便宜,大家可以参考.
总结,ADC的参考电压是非常重要的,所以参考电压精确度不容忽略,要尽可能地使参考电压稳定,不受干扰。
这个知识我们就分享到这里,你理解了吗?
在C语言关键字中const举足轻重,我们今天就深度聊一聊const的定义和实际应用,让它不再是迷。
C语言中const关键字是constant的缩写,是恒定不变的意思。通常翻译为常量、常数等,我们一看到const关键字马上就想到了常量。这是不精确的,精确来说应该是只读变量,其值在编译时不能被使用,因为编译器在编译时不知道其存储的内容。那么const推出的初始目的正是为了取代预编译指令,消除它的缺点,同时继承它的优点。
事实上在C语言中const功能很强大,它可以修饰变量、数组、指针、函数参数等。
1、const 修饰的只读变量:
C语言中采用const修饰变量,功能是对变量声明为只读特性,并保护变量值以防被修改。
例如:
const int Max = 100;
int Array[Max];
这个大家可以在Visual C++6.0创建一个.c文件测试一下,你会发现在.c文件中编译器会提示出错。我们知道定义一个数组必须指定其元素的个数,这也从侧面证实在C语言中const修饰的Max仍然是变量,只不过是只读属性罢了。
还有值得注意的是,定义变量的同时,必须初始化,并且不能再重新赋值。
2、节省空间,避免不必要的内存分配,同时提高效率
编译器通常不为普通const只读变量分配存储空间,而是将他们保存在符号表中,这使得它成为一个编译期间的值,没有了存储与读内存的操作,使得它的效率也很高。
例如:
#define M 3 //宏常量
const int N= 5; //此时并未将N放入内存中
int i = N; //此时为N分配内存,以后不再分配
int I = M; //预编译期间进行宏替换,分配内存
int j = N; //没有内存分配
int J = M; //再进行宏替换,又一次分配内存
const定义的只读变量从汇编的角度来看,只是给出了对应的内存地址,而不是像#define一样给出的是立即数。所以,const定义的只读变量在程序运行过程中只有一份备份(因为它是全局的只读变量,存放在静态区),而#define定义的宏常量在内存中有若干个备份。#define宏是在预编译阶段进行替换,而const修饰的只读变量是在编译的时候确定其值。#define宏没有类型,而const修饰的只读变量具有特定的类型。
3、修饰一般变量
一般变量是指简单类型的只读变量。这种只读变量在定义时,修饰符const可以用在类型说明符前,也可以用在类型说明符后,例如:
int const i = 2; 或 const int i = 2;
4、 修饰数组
C语言中const还可以修饰数组,举例如下:
const int array[5] = {1,2,3,4,5};
array[0] = array[0]+1; //错误
数组元素与变量类似,具有只读属性,不能被更改;一旦更改,如程序将会报错。
5、 修饰指针
C语言中const修饰指针要特别注意,共有两种形式,一种是用来限定指向空间的值不能修改;另一种是限定指针不可更改。举例说明如下:
Const离谁近修饰谁的原则,
例如:
const int * p1; //定义1,p1可变,p1指向的对象不可变
int * const p2; //定义2,p2不可变,p2指向的对象可变
上面定义了两个指针p1和p2。
在定义1中const限定的是*p1,即其指向空间的值不可改变,若改变其指向空间的值如*p1=20,则程序会报错;但p1的值是可以改变的,对p1重新赋值如p1=&k是没有任何问题的。
在定义2中const限定的是指针p2,若改变p2的值如p2=&k,程序将会报错;但*p2,即其所指向空间的值可以改变,如*p2=80是没有问题的,程序正常执行。
6、修饰函数参数
const修饰符也可以修饰函数的参数,当不希望这个参数值在函数体内被意外改变时使用。所限定的函数参数可以是普通变量,也可以是指针变量。举例如下:
void fun1(const int i)
{
其它语句
……
i++; //对i的值进行了修改,程序报错
其它语句
}
告诉编译器i在函数体中不能改变,从而防止了使用者的一些无意或者错误的修改。
void fun2(const int *p)
{
其它语句
……
(*p)++; //对p指向空间的值进行了修改,程序报错
其它语句
}
7、修饰函数的返回值
Const修饰符也可以修饰函数的返回值,返回值不可被改变。
Const int Fun(void);
到这里const的定义和常用的说明我给大家做了描述,有疑问和其他想法欢迎交流~

大家好,我是张飞实战电子黄忠老师,今天我们来讲解下图解边沿对齐,中心对齐PWM...
在说边沿对齐,中心对齐前,我们先来段铺垫,PWM又称脉冲宽度调制,我们通过调节脉冲的占空比,我们可以控制电压的大小(比如我们满占空比时电压为12V,我们可以通过调节占空比让电压变为7V、5V甚至变为0V,实现输出电压可控)。
调节占空比后,输出电压怎么就变化了呢?可以用等效面积法来解释,例如在1ms周期里,满占空比时输出电压为12V,50%占空比时(即高低电平各占时间为0.5ms)高电平在整个周期的面积只有原来的1/2了,此时输出电压就等效为12*1/2=6V,那么通过调节不同的占空比,也就实现了输出电压调节。如图:
那STM32中是怎么生成PWM波的呢?时钟是芯片的心脏,没有时钟,芯片就是一块“废物”,有了时钟,芯片才能有条不紊的工作,那时钟跟我们要讲的PWM有什么关系呢?请看下图,STM32内部的定时器框图,看看它是如何生成PWM的。
方框内部的CNT Counter计数器会根据输入的时钟沿跳变来进行递加/减,时钟的频率决定了计数器递加/减的频率,这个计数器的值同时会和Auto-reload register(控制周期)、Capture/Compare x register(控制占空比)进行比较,当与控制占空比的寄存器值发生匹配时则控制输出引脚TIMx_CHx发生电平反转,当与控制周期寄存器值发生匹配时,周期结束,引脚电平置位,再次重复如上动作,就在引脚上输出了变化不同的电平,这个就是我们需要的PWM。
这个定时器模块可以根据软件编程设置出不同的PWM模式,定时器内部CNT Counter可被编程为向上、向下、向上向下运行,我们说的边沿对齐,和中心对齐就要从这个计数方式上切入,下面我们先来看三种不同的计数方式。
1.当CNT被设置为向上计数时,计数器从0递增向上计数到自动重载值(Auto-reload register),然后计数器又回到0,重新开始。
2.当CNT被设置向下计数时,计数器从自动重载值递减向下计数,计数到0,计数器又回到重载值,重新开始。
3.当CNT被设置向上向下计数时,计数器从0递增向上计数到自动重载值,然后计数器从自动重载值递减向下计数,计数到0然后又开始递增向上计数。
那这三种模式和2种PWM又是什么关系呢?PWM是怎么从引脚上输出的呢?请看下图:
1.向上/下计数模式PWM生成(只展示出了向上计数,向下计数同理):
2.向上向下计数模式PWM生成:
上文中提到的向上计数/向下计数,这两种生成PWM的方式,我们通常称为边沿对齐PWM;既向上又向下这种生成PWM的方式,我们称为中心对齐PWM。当然,发生匹配的时候引脚电平如何变化,是变高还是变低,这个可以通过软件编程来设置。
通过PWM调节输出电压,比如可以控制做呼吸灯,也可以实现电机的调速,不同的调速算法,会用到不同的PWM等等。
 黄忠
黄忠