电源
91篇文章
大家好!我是张飞实战电子的郭嘉老师,这篇文章继续聊一聊新能源汽车旋转变压器驱动电路讲解。
旋变驱动电路怎么选择驱动管Q1和Q2
在功率放大电路中,应根据晶体管所承受的最大管压降Vces、集电极最大的电流Icm和最大的功耗来选择晶体管。
1、最大的管压降
从OCL电路工作原理的分析可知,两只功放管中Q1和Q2处于截至状态的管子将承受较大的管压降。假设输入电压Ui为正半周,Q1导通,Q2截至,当Ui从0开始增加到峰值时,Q1和Q2管的发射极电位Ve逐渐增加到(VCC-Vces1),因为Q2管的管压降Vec2的数值 Vec2=(Ve-0)=Ve,Vce2max=Vcc-Vces1.利用同样的分析方法去分析,可得:
当Ui为负的峰值时,Q1管承受最大的管压降,数值为VCC-Vces2.所以考虑要预留一定的余量,管子承受最大的压降为/Vcemax/=Vcc。
2、集电极最大电流
从电路最大输出功率的分析可知,晶体管的发射极电流等于负载电流,负载电阻上的的最大电压为Vcc-Vces1,故集电极电流的最大值为:
Ic≈Iemax=(Vcc-Vces1)/RL
考虑留有一定余量
Icmax=Vcc/RL
3、集电极最大功率
在功率放大电路中,电源提供的功率,除了转换输出功率外,其余部分主要消耗在功率管Q1和Q2上,可以认为晶体管所损耗的功率Pq=Pv-Po。当输入电压为2.5v时,即输出功率最小时,由于集电极电流非常小,使管子的损耗很小;当输入电压最大时,即输出功率最大,由于管子压降很小,使管子的损耗也很小;可见,管耗最大既不会发生在电压电压最小时,也不会发生在输入电压最大时。下面列出了晶体管的集电极功耗Pq与输出电压峰值Vom的关系,然后对Vom求管压降和集电极电流瞬时值的表达式:
Vce=(Vcc-Vomsinwt),Ic=Vom/RL*sinwt
功耗Pq为功放管Q1和Q2管所损耗的平均功率,所以每只晶体管的集电极功耗表达式为:
瞬时最大的管压降*瞬时的电流 再求平均
=1/RL(Vcc*Vom/Π-Vom^2/4)
假设dPq/dVom=0,可以求得,Vom=2/Π*Vcc≈0.6Vcc。
以上分析表明,当Uom≈0.6Vcc时,Pq=Pqmax。 将Uom代入Pq==1/RL(VccUom/Π-Uom^2/4)
Pqmax=Vcc^2/Π^2RL
当Vces=0时,根据Pom=Vom^2/RL=Vcc^2/2RL
Pqmax=2*Pom/Π^2≈0.2Pom/Uces=0
可见,晶体管集电极最大功耗仅为理想(饱和压降为0)时最大输出功率的五分之一。
查询手册选择晶体管时,应使用极限参数
Vbrceo>Vcc
Icm>Vcc/RL
Pcm>0.2Pom/Vces=0, Pcm集电极功耗
这里仍需要强调的,在选择晶体管时,其极限参数,特别是Pcm应留一定的余量,并且严格按照手册PCBlayout或安装散热片。
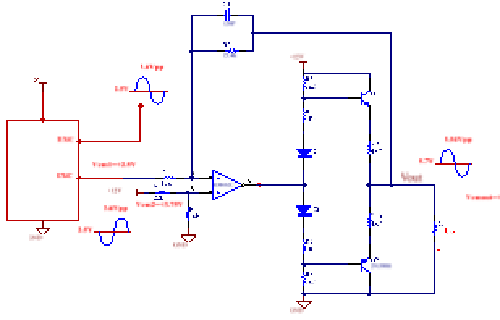
图(2)消除交越失真的OCL电路
图(3.1) 输入特性的中的图解分析
当输入电压足够大,且有不产生饱和失真时,电路的分析如下图3.2所示:图中的I区为Q1的输出特性,II区为Q2的输出特性。
大家好!我是张飞实战电子的郭嘉老师,这篇文章聊一聊新能源汽车旋转变压器驱动电路讲解最终篇。
旋变器驱动电路总结
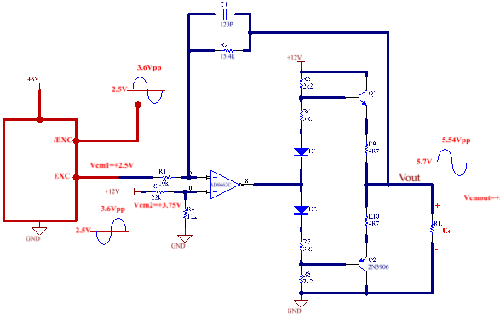
图(1) 旋变解码芯片AD2S1210的典型电路
由于旋变器的输入信号要求,激励缓冲器必须提供高达 200mA 的单端电流。图 1 所示的缓冲电路不仅提供电流驱动能力,而且提供 AD2S1210 激励输出信号的增益。本电路说明性能要求及推荐的激励缓冲拓扑结构,典型旋变器的输入电阻在100 Ω 至 200 Ω 之间,初级线圈应利用 7 V rms 的电压驱动。该旋变解码芯片支持 3.15 V p-p ±27%范围的输入信号。AD2S1210的额定频率范围为 2 kHz 至 20 kHz。采用 Type II 跟踪环路跟踪输入信号,并将正弦和余弦输入端的信息转换为输入角度和速度所对应的数字量。该器件的额定最大跟踪速率为 3,125rps。
AD2S1210 采用 5 V 电源供电,输出缓冲电路要求 12 V 电源(图1所示),以便向旋变器提供所需的差分信号幅度。
图 1 所示为 AD2S1210、AD8662 和相关电路的原理图,其中包括一个推挽输出级,它能够向旋变器提供所需的电源。本电路的优势之一是当不存在信号时,输出晶体管只需要少量静态电流。AD2S1210 的激励输出通常在EXC和/EXC输出端提供 3.6 Vp-p正弦信号,这将产生一个 7.2 V p-p差分信号。汽车旋变器的典型转换比为 0.286。因此,如果将一个单位增益缓冲器配合 AD2S1210 使用,则旋变器输出的幅度约为差分2 V p-p。这种信号的幅度不足以满足 AD2S1210 的输入幅度要求。理想情况下,正弦和余弦输入应具有差分 3.15 V p-p 的幅度,因此缓冲器级应提供约 1.5 的增益。
图 1 所示激励缓冲器的增益通过电阻 R1 和 R2 设置。在电路测试期间,R1 和 R2 电阻的值分别为 10 kΩ 和 15.4 kΩ,对应的增益为 1.54。电阻 R3 和 R4 设置放大器的共模电压 VCM(2) = +3.75 V。激励输出的共模电压 VCM(1) = +2.5 V(中间电源电压),差分电压VPP(1)=3.6V。因此,缓冲器输出共模电压 VCM(OUT)约为+5.7 V(+12 V 电源的大约一半),VPP(out)=5.54V。
2.2 kΩ 电阻为推挽电路输入端的二极管 D1、D2 提供偏置电流,并确立该侧的静态电流。D1 和 Q1 上的电压(VBE)应保持一致,D2 和 Q2 上的电压(VBE)应保持一致。3.3 Ω 电阻和 4.7 Ω 电阻上的电压也应保持一致。选择运算放大器 AD8662 是为了满足推挽输出级的驱动要求。旋变器和 RDC 转换器往往用于工况比较差环境中,因此一般需要能够在扩展温度范围(−40°C 至+125°C)工作的器件。该运放应提供 2 MHz 以上的带宽,输入失调电压应小于 1 mV。注意不得在 0 V 附近让信号引入失真,因为该失真可能无法被旋变器本身滤除。确保无失真的方法是设置输出晶体管的偏置,使得过零时仍然有足够的电流来维持线性。
由于所选的拓扑结构可以采用单电源供电,因此针对缓冲器选择的运放也应当能够采用单供电轨供电。AD8662 采用+5 V 至+16 V 的单电源供电,提供轨到轨输出,因而是理想的选择。电容C1 与电阻R2 并联形成一个低通滤波器,用来滤除EXC和/EXC输出上可能存在的任何噪声。应谨慎选择此滤波器的截止频率,确保滤波器所引起的载波相移不超过AD2S1210 的锁相范围。注意,电容C1 不是必需的,因为旋变器可以滤除AD2S1210 激励输出中的高频成分。应当注意,在电路验证过程中,旋变器的输出直接连接到AD2S1210 输入。客户应用中经常会使用其它调整电阻和/或无源 RC 滤波器。在 AD2S1210 之前可以使用其它无源器件,但应注意不要超过数据手册规定的 AD2S1210 最大锁相范围。外
部无源器件可能会导致通道间幅度不匹配误差,这会直接转化为位置误差。因此,信号路径中推荐使用至少 1%容差的电阻和 5%容差的电容。
图 4.1 所示为 70°角时采集到的 12 位角度精度码:
12 位角度精度码直方图,70°角,10,000 次采样
图 4. 2 位角度精度码直方图,70°角,10,000 次采样
所示为 16 位角度精度码直方图。
16 位角度精度码直方图,70°角,10,000 次采样
图 4.3 所示为 100 rps 旋转速率和 16 位分辨率设置时的速度输出码直方图。
16 位速度输出码直方图,100 rps,10,000 次采样

大家好!我是张飞实战电子的郭嘉老师,这篇文章聊一聊新能源汽车旋转变器介绍。
上图是新能源旋变器的转子和定子示意图,极对数是4、励磁电压有效值是7V、励磁频率10KHz、输出电压有效值2+-10%、相位移15°、变比等于输出电压有效值/励磁电压有效值,即2V/7V=0.285.
R1和R2励磁的输入信号,S1和S3是COS输出,S2和S4是sin输出。测试波形如下:
励磁输入:Ve=E*sin(ω*t)
正玄输出:V1=K* E*sin(ω*t)*sinθ
余玄输出:V2=K* E*sin(ω*t)*cosθ
其中,θ为旋变转子角度;ω为励磁载波频率;E为励磁输入峰值电压;K为转换比例。
分流器是根据检测直流电流通过电阻时在电阻两端产生电压的原理构建的。分流器属于直接式检测法,测量电流的上限一般不能太大,最大30A,如果超过30A检流电阻的压降会很大,,散热处理比较困难或者散热成本大大增加。电阻上直接得到的电压信号是模拟量值很小的模拟信号,还需外接放大电路将信号放大,再通过ADC转化为数字信号。如下图所示:R544和R545实现电流检就叫做分流检测。
开环电流传感器:
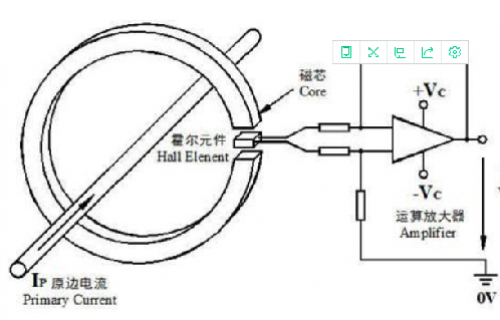
霍尔电流传感器是 根据霍尔效应制作的一种磁场传感器,属于间接测量,可以测量各种类型的电流,从直流到几十干赫兹的交流。霍尔电流传感器包括开环式和闭环式两种,高精度的霍尔电流传感器大多属于闭环式,闭环式霍尔电流传感器基于磁平衡式霍尔原理,即闭环原理,当原边电流 IP 产生的磁通通过高品质磁芯集中在磁路中,霍尔元件固定在气隙中检测磁通,通过绕在磁芯上的多匝线圈输出反向的补偿电流.用干抵消原边 IP 产生的磁通、使得磁路中磁通台终保持为零。经过特殊电路的处理,传感器的输出端能物输出精确反映原边电流的变化。
霍尔电流传感器只需外接正负直流电源,被测电流母线从传感器中穿过,即可完成主电路与控制电路的隔离检测,简化了电路设计。霍尔电流传感器的输出信号是副边电流 IS,它与输入信号(原边电流 IP)成正比, IS一般很小,只有几十到几百毫安。如果输出电流经过测量电阻 Rm,则可以得到一个与原边电流成正比的大小为几伏的电压信号,经A/D转换,可方便地与计算机和各种仪表接口。
霍尔电流传感器具有优越的电性能,是一种先进的、能隔离主电路回路和电子控制电路的电测量元件。它综合了互感器和分流器的所有优点,同时又克服了互感器和分流器的不足。具有精度高、线性好、响应快的优点,但此方法易受干扰,不适合在复杂的工作环境和电气环境中使用,同时元器件也易损坏。
本章重点讲解开环电流传感器:
LEM这款用于直流电子测量,汽车用的大功率、低压交流或脉冲电流信号与BMS主电流回路之间的高低压分离电路,也就是说大功率电路与低压部分隔离,在设计电路中可以选择不通量程的电流传感器,满足不同电驱动对电流测试的要求。
比例测量电流传感器的性能和主要特点:
1、采用霍尔效应的开环传感器
2、实现高压与低压隔离,可以把信号输出给低压电路直接采样
3、电流传感器的供电电源是直流+5V
4、单次电流测量范围+-800A,可以根据不同的功率要求去选择
5、输出电压:全比例输出
大家好!我是张飞实战电子的郭嘉老师,这篇文章接着聊一聊新新能源汽车电流传感器的采样电路的讲解。
本章重点讲解开环电流传感器:
原理框架图
LEM这款用于直流电子测量,汽车用的大功率、低压交流或脉冲电流信号与BMS主电流回路之间的高低压分离电路,也就是说大功率电路与低压部分隔离,在设计电路中可以选择不通量程的电流传感器,满足不同电驱动对电流测试的要求。比例测量电流传感器的性能和主要特点∶
1、采用霍尔效应的开环传感器
2、实现高压与低压隔离,可以把信号输出给低压电路直接采样
3、电流传感器的供电电源是直流+5V
4、单次电流测量范围+-800A,可以根据不同的功率要求去选择
5、输出电压∶全比例输出
这款霍尔电流传感器的优势:
1、电流采样精度比较高
2、线性度比较好
3、温漂比较低
4、弱电和强电分析
5、带宽比较大
6、硬件和软件比较容易实现。
7、灵敏度高 2.5mV/A
这款开环电流传感器采用的是霍尔效应集成电路,磁通密度是B,有助于霍尔的Vout上升电压,由待测边电流Ip产生。被测的电流Ip由高压电流源提供,在新能源汽车里就是BMS管理系统提供。在滞后周期的线性区域内,也就是说高压输入与输出有延时性,B是成比例的:B(Ip)=a*Ip
霍尔输出电压表示为(未经过运放放大):VH = (cH / d) × IH × a × Ip,除了电流Ip,上面的方程都是常数。
所以:VH = b × IP a:常数 b:常数 cH:霍尔系数 d:霍尔板厚度 IH: 穿过霍尔板的电流。测量霍尔输出信号VH,通过运放放大以后输出电压,供MCU采样电流使用。
这款电流传感器的力学特性:PBT GF30塑料外壳,FeSi卷磁芯,重量52g±5%,镀黄铜pin脚,IP水平IP2,连接器的类型是TYCO(泰科) 连接器 P/N号码1473672-1,组装时螺丝刀的扭矩控制在2.2N.m±5%。
电流传感器内部原理图如下:
从上图可知,电流传感器的核心主要由两部分组成,第一部分霍尔,第二部分运算电路。上图的器件清单,霍尔传感器的ASIC,去耦储能电容C1=47nF,EMC保护滤波电容C2=4.7nF,A(Vout)是低压信号的输出,B、D是低压电源地,C(Uc)是5V的电源电压,这个电压决定了Vout输出误差大小。
 郭嘉
郭嘉